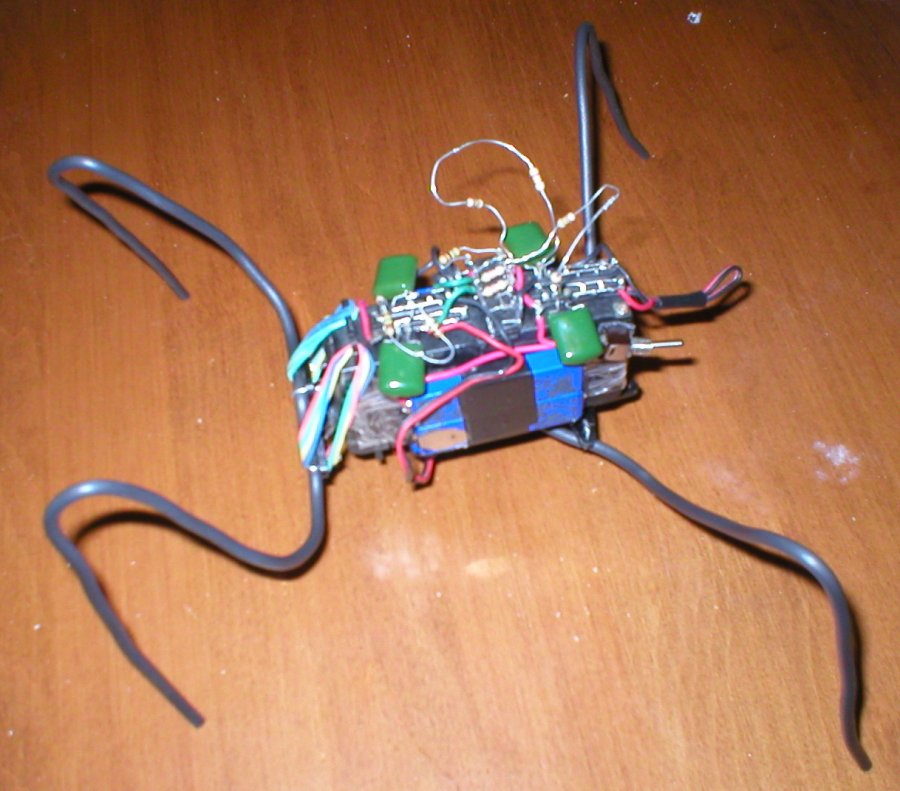
Frankenstein the Walker
Frankenstein is a 2 motor walker I built directly from the pages of Junkbots, Bugbots, and
Bots on Wheels. He uses 2 modified servos using the rear one for forward thrust and the front
one for lift. The legs are made out of standard house wiring and are easy to bend. This makes
it very easy to experiment with different leg shapes. Can you guess how he got his name?
Frankenstein (underside)
Here you can see the rear motor centering spring. This spring causes the rear motor to more
easily return to center much like your fingers go to a natural resting position when relaxed.
The rubber bands on the front (lift) motor do the same thing. I've found that using these small
rubber bands makes it very easy to adjust the amount of centering force. This is a critical
adjustment to get right. The blue flat batteries on Frankenstein's sides were FREE. I got them
from the local Radio Shack store before they threw them away. They were inside a cell phone
battery and were brand new! I have gotten many batteries in this way from them. The phones they
were made for are now extinct, but the batteries live on.
The Brain of Frankenstein
This is type of circuit is called a Master-Slave Bicore. This means that one section keeps the
timing while the other section follows with a short delay. There is a third section called the
Reverser section. This part isn't being used yet but will be attatched to tactile sensors. When
one of the sensors is triggered, the Reverser causes a phase shift of about 180 degrees on the
rear (thrust) motor. This will cause Frankenstein to back away from obstacles and set off in a
new direction. The wires hanging up in the air are resistors. They plug into miniature sockets
on the brain to adjust many different aspects of timing on the bot. Once they are adjusted to
give the best performance, they will be clipped and neatly positioned close to the brain.
I will be adding the schematic and freeform layout for this bot at a later date.
For information on how to build your own 2-Motor walker, pick up the book "Junkbots, Bugbots,
and Bots on Wheels" at
Solarbotics.Com or check out their
excellent library on the subject at
Solarbotics.Net.
.jpg)
.jpg)